

Un variador de frecuencia variable (VFD) o variador de velocidad es un dispositivo electrónico que controla la velocidad de los motores de inducción de CA. Un motor de inducción de CA funciona a una velocidad dependiente de la frecuencia aplicada con una ligera reducción de velocidad, conocida como deslizamiento. Para controlar la velocidad del motor, necesitaremos variar esa frecuencia y también controlar el voltaje aplicado para mantener el flujo óptimo, o campo magnético.

Mover mercancías en una fábrica moderna es rápido y sencillo, con los propulsores controlados
Casi todos los variadores de frecuencia funcionan tomando la fuente de corriente alterna existente, convirtiéndola en corriente continua usando un rectificador, y luego reconvirtiéndola en una fuente de frecuencia variable mediante un inversor. El inversor es la parte clave de esto, por lo que un variador de frecuencia a veces se llama simplemente inversor.
Los inversores, y en menor medida los rectificadores, dependen de semiconductores modernos que pueden conmutar y conducir altos tensiones (como tensiones de alimentación) y corrientes de cientos de amperios. También requieren microprocesadores potentes para controlarlos. Estos componentes solo han estado disponibles a un precio y fiabilidad razonables en los últimos treinta años aproximadamente, por lo que los accionamientos de corriente alterna son un producto industrial relativamente moderno.
¿Entonces, cómo funcionan realmente?
Empecemos con el rectificador. La Figura 1 muestra un rectificador trifásico compuesto por seis diodos conectados a un condensador y una resistencia como carga simple.
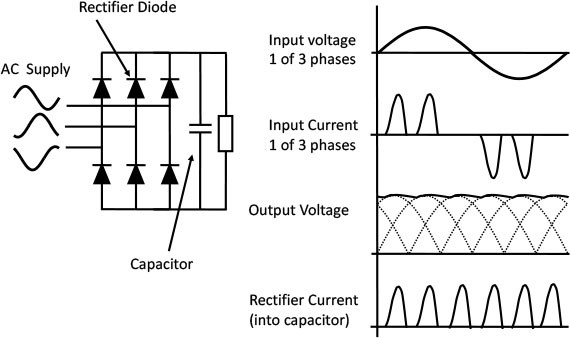
Fig. 1 Rectificador trifásico con condensador y carga resistiva
Los diodos conducen en una sola dirección (en la dirección en la que apuntan), el condensador almacena energía un poco como una batería, la resistencia actúa como carga. Si conectamos una fuente trifásica a las entradas de la izquierda, empezaremos a bombear corriente al condensador, y el voltaje se acumulará, provocando un flujo de corriente en la resistencia. Puedes seguir el camino de conducción de una fase a otra a través de un diodo superior, el condensador/resistencia y luego a través de un diodo inferior.
En estado estacionario, el voltaje del condensador se mantendrá bastante cerca del pico de la tensión de onda senoidal de entrada. Ahora los diodos solo conducen cuando la tensión de entrada es mayor que la tensión del condensador. En consecuencia, hay un pulso corto de corriente a través de cada diodo por turno, lo que da lugar a la característica forma de onda de corriente de ‘picos gemelos’ en cada una de las tres fases, como se muestra en la figura. Si usamos una fuente monofásica, solo necesitamos cuatro diodos, y obtendremos un solo pico por medio ciclo, así que necesitaremos un condensador más grande para mantener las brechas en los picos de tensión.
En sistemas monofásicos o trifásicos, estos pulsos de corriente pueden tener consecuencias en el suministro, como veremos más adelante. Sin embargo, ahora tenemos una tensión de corriente continua relativamente suave en el condensador. Si quitamos la resistencia y conectamos un inversor en su lugar, empieza a parecer un variador de frecuencia (Figura 2). La parte de corriente continua a veces se llama enlace de corriente continua porque une el rectificador y el inversor.
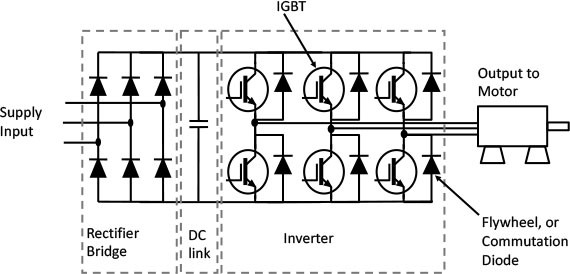
Fig. 2 Sección de potencia de variadores de frecuencia
Ahora, la parte empresarial. Disponemos de seis transistores bipolares de puerta aislada (IGBT). Estos funcionan como interruptores de encendido muy rápidos. Tienen diodos en paralelo con ellos por razones que se aclararán.
Ahora podemos activar un IGBT superior e inferior y proporcionar un camino de corriente a través de cualquier par de conexiones de motor. Para activar un IGBT, simplemente aplicamos unos pocos voltios a la puerta (que aquí se muestra como no conectada). Luego el IGBT conduce en dirección a la flecha. Dependiendo de qué IGBT activemos, podemos crear un camino de corriente positivo o negativo a través del motor. Por eso podemos fabricar CA a partir de CC.
Lo que no hacemos es activar un IGBT superior e inferior, que están directamente uno encima del otro, ya que esto proporcionaría un cortocircuito al enlace de corriente continua. Si en cambio encendemos y apagamos los IGBT en una secuencia cuidadosamente controlada, podemos acumular una corriente trifásica en los devanados del motor. Si variamos el tiempo durante el que encendemos y apagamos los IGBT, podemos controlar esta corriente. Esto se debe a que la corriente del motor no cambia muy rápidamente, así que aumentando y disminuyendo los tiempos de encendido, podemos elegir acumular una corriente de onda sinusoidal en el motor prácticamente a cualquier frecuencia que queramos. Esto, por supuesto, es lo que queremos hacer para controlar la velocidad del motor. Usando la misma técnica, podemos controlar el voltaje efectivo, que a su vez controla el campo magnético.
Este control de tiempo de encendido se llama Modulación de Ancho de Pulso (PWM), y se muestra de forma sencilla en la Figura 3; al encender y apagar los seis IGBT se proporcionan los caminos de corriente hacia el motor y permite que fluya una corriente de onda senoidal trifásica, girando el motor a la velocidad deseada.
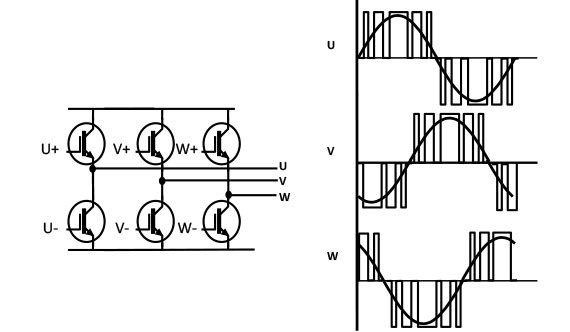
Fig. 3 Modulación de ancho de pulso
Si cambiamos nuestros IGBT varias miles de veces por segundo (normalmente entre 4 y 16kHz) podemos construir una forma de onda de corriente bastante agradable, como se muestra en la Figura 4.
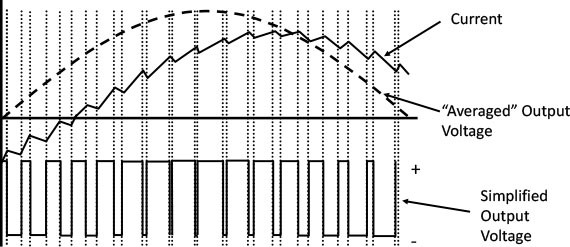
Fig. 4 Voltaje y corriente en el motor
Fíjate que el voltaje de salida consiste en muchos pulsos en lugar de una onda sinusoidal agradable. El motor suaviza la corriente hasta convertirla en una onda sinusoidal ligeramente dentada, pero el voltaje sigue consistiendo en la forma de onda PWM de los IGBT. Esto puede causar problemas que discutiremos más adelante. Sin embargo, el motor se conforma con la corriente irregular y gira a la velocidad requerida. La corriente del motor está desfasada con el voltaje ‘medio’ debido al factor de potencia del motor.
¿Entonces, qué hacen los diodos en el inversor? Bueno, la corriente en el motor no cambia muy rápido, así que cuando apagamos un IGBT la corriente tiene que seguir fluyendo, o habrá problemas. Los diodos proporcionan automáticamente este camino de corriente al activar o conmutar la corriente. De ahí el nombre de diodos de conmutación o volante de inercia.
Los inversores son muy difíciles de controlar: se han descrito como un cortocircuito a punto de ocurrir, pero los semiconductores modernos de potencia son bastante robustos, y los procesadores digitales rápidos y potentes permiten un control fiable y preciso de la conmutación de encendido y apagado.
Por cierto, la parte de potencia del variador de frecuencia está toda conectada a la fuente de corriente alterna y opera a tensiones de corriente continua desde 300V (con entrada de 230V CA) hasta 600 – 900V con fuentes industriales trifásicas. Por tanto, el aislamiento interno entre los circuitos de control, las interfaces del cliente y la parte de alimentación es crítico para la seguridad.
En el próximo artículo analizaremos el diseño práctico de un variador de frecuencia, con toda la complejidad de la protección, refrigeración e interfaz para el cliente.



